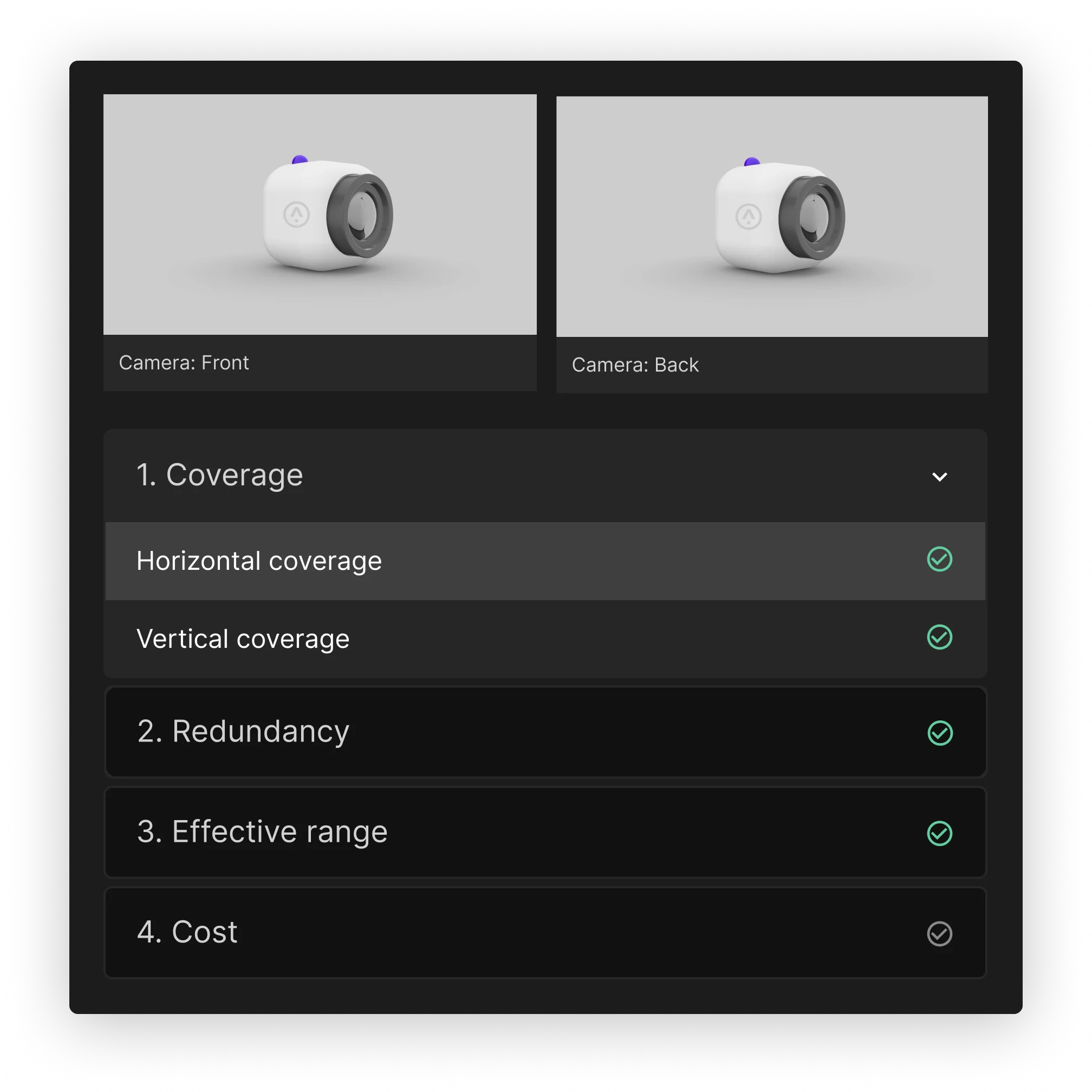
すべてのソリューションスペースを考慮し、エッジケースの欠陥を明らかにし、確実に最良のセンサースイートオプションを見つけます。
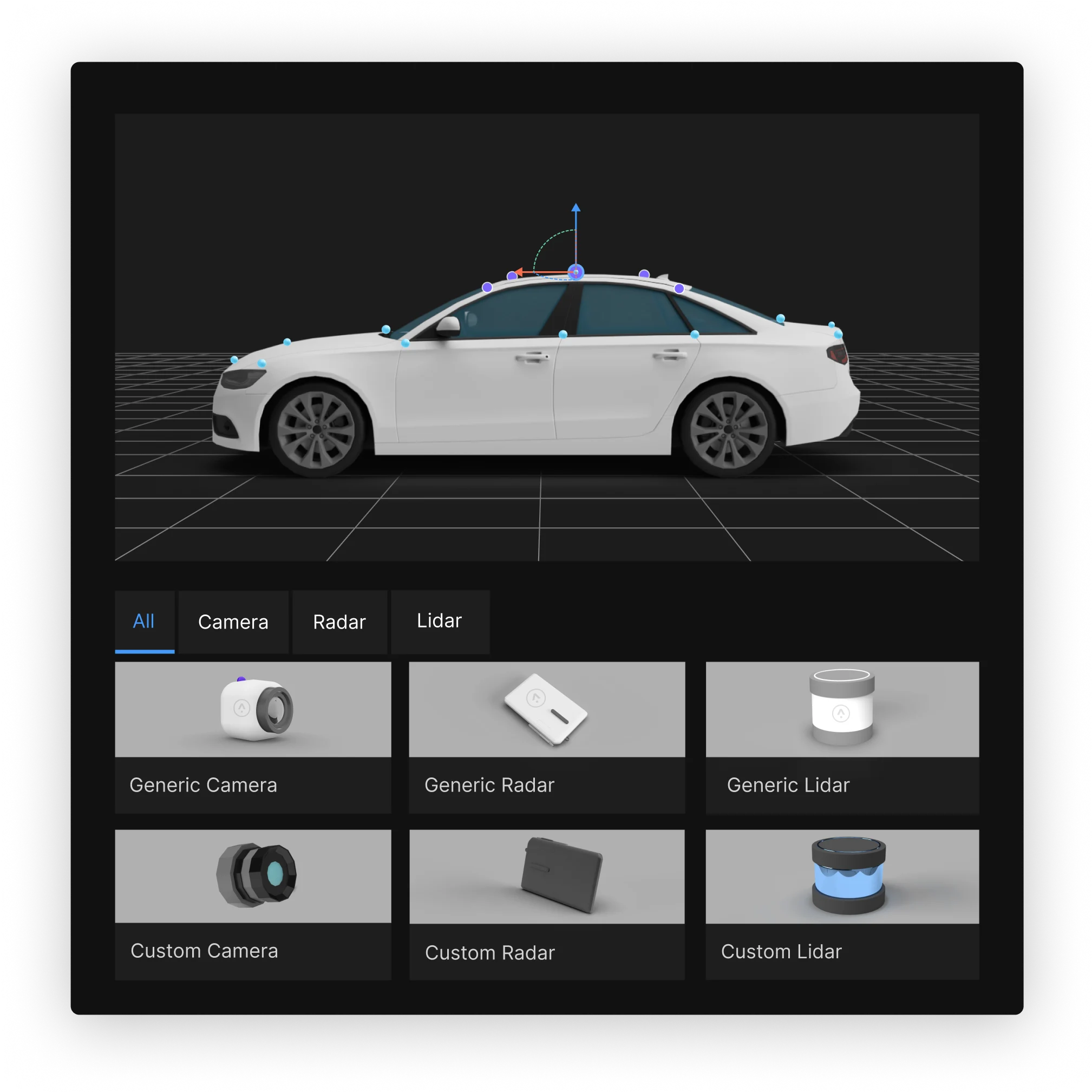
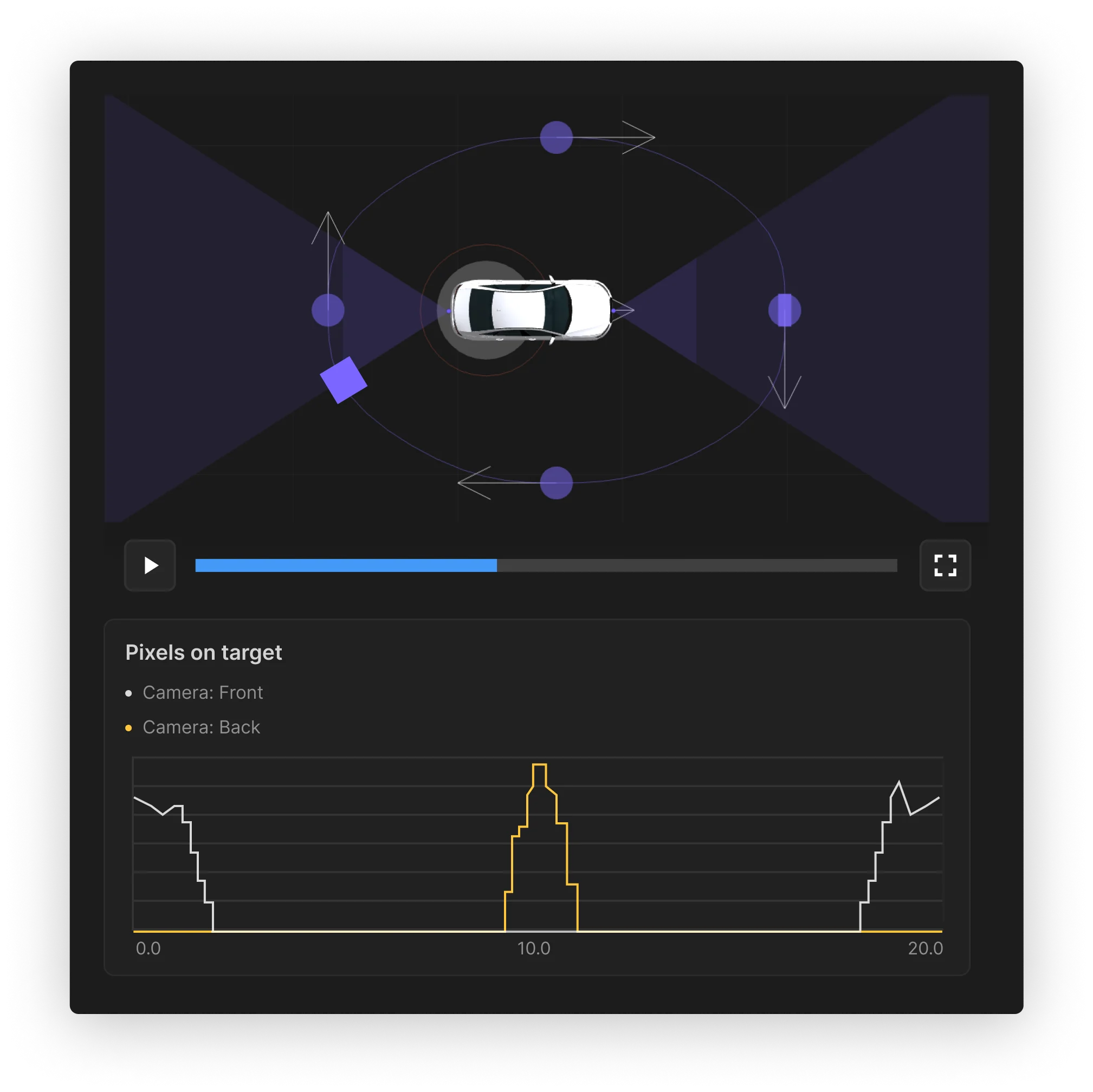
物理的なサンプルが入手可能になる前に、今度のセンサーを評価し、シミュレーションで性能を検証し、実世界のテストに費やす時間を90%削減します。
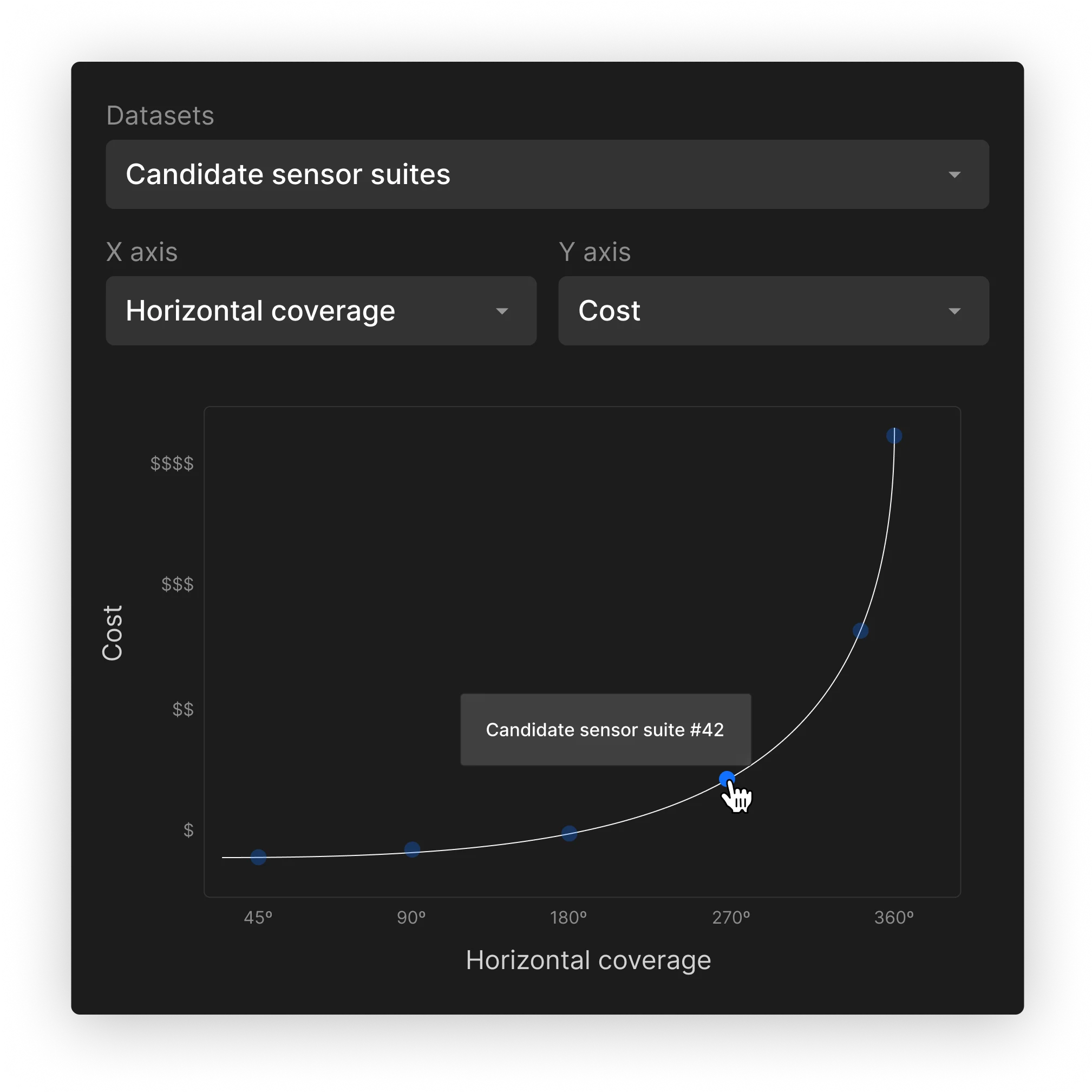
様々な物理センサーの購入と実環境テストを実施するコストを回避します。
.webp)
.webp)
.webp)




