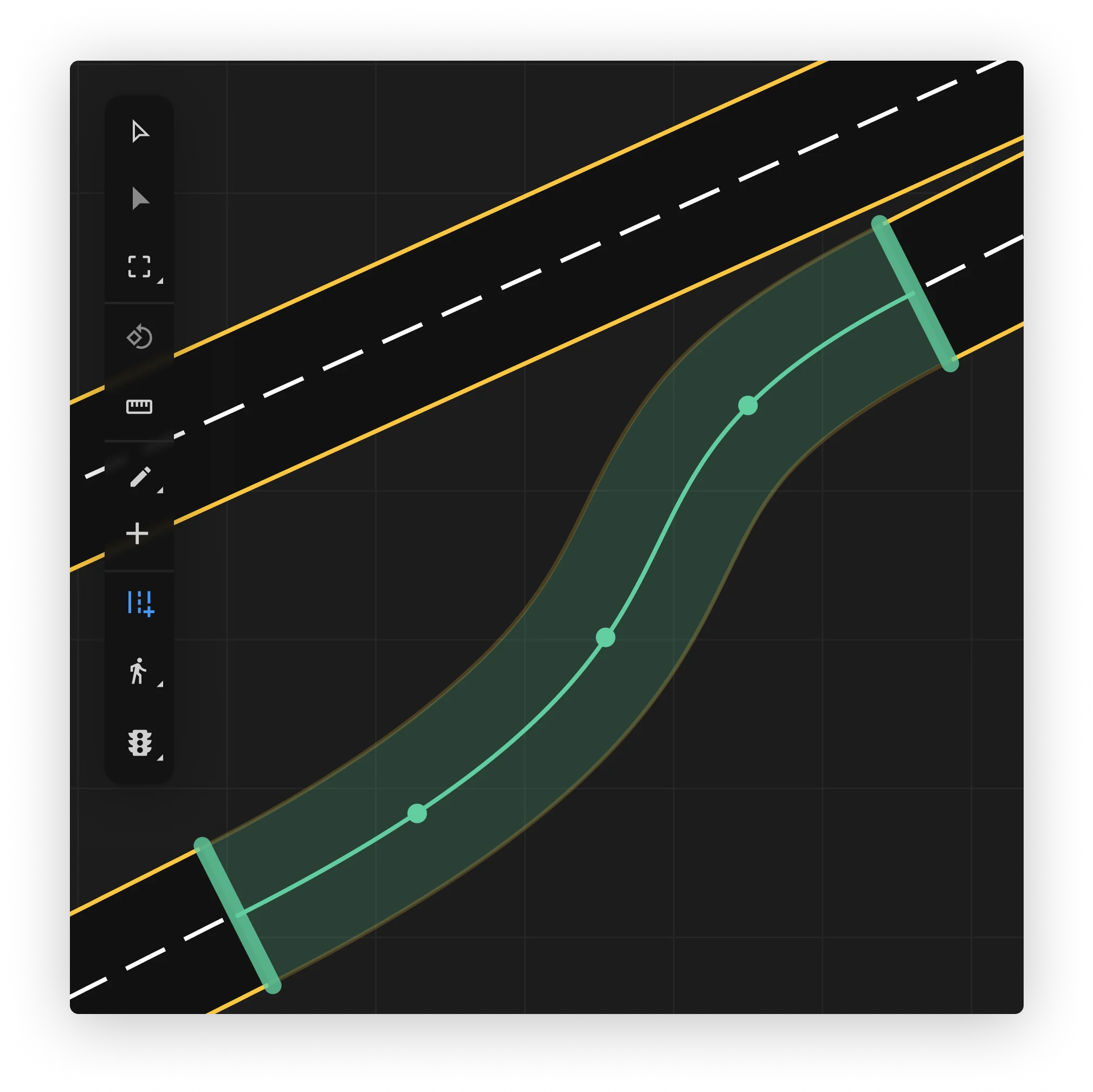
高価で時間のかかる実世界での試験への依存を軽減します。合成地図を使用してシステムを簡単に検証できます。
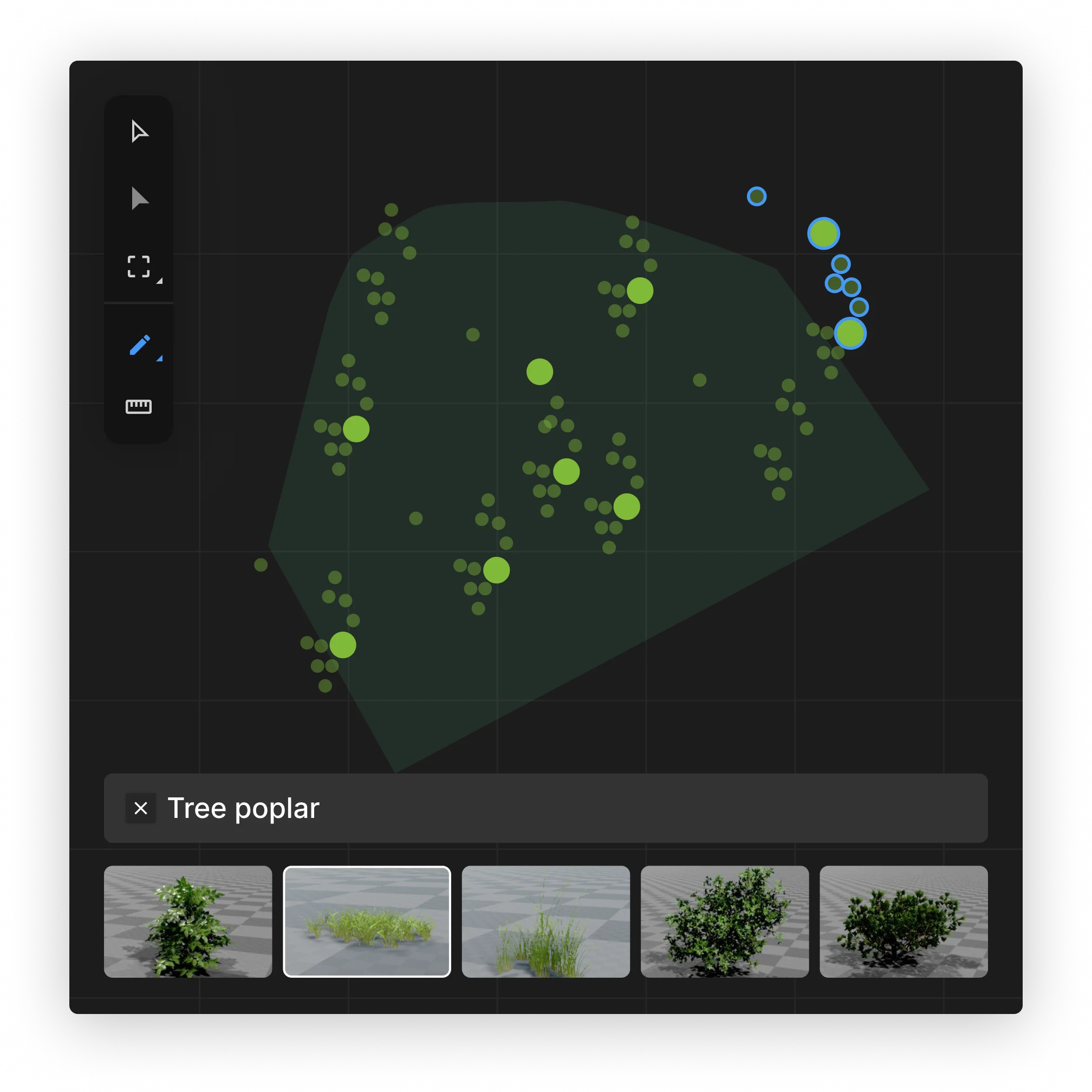
AVシステムを総合的にテストします。エッジケースや現実世界ではほとんど発生しない領域を特定します。
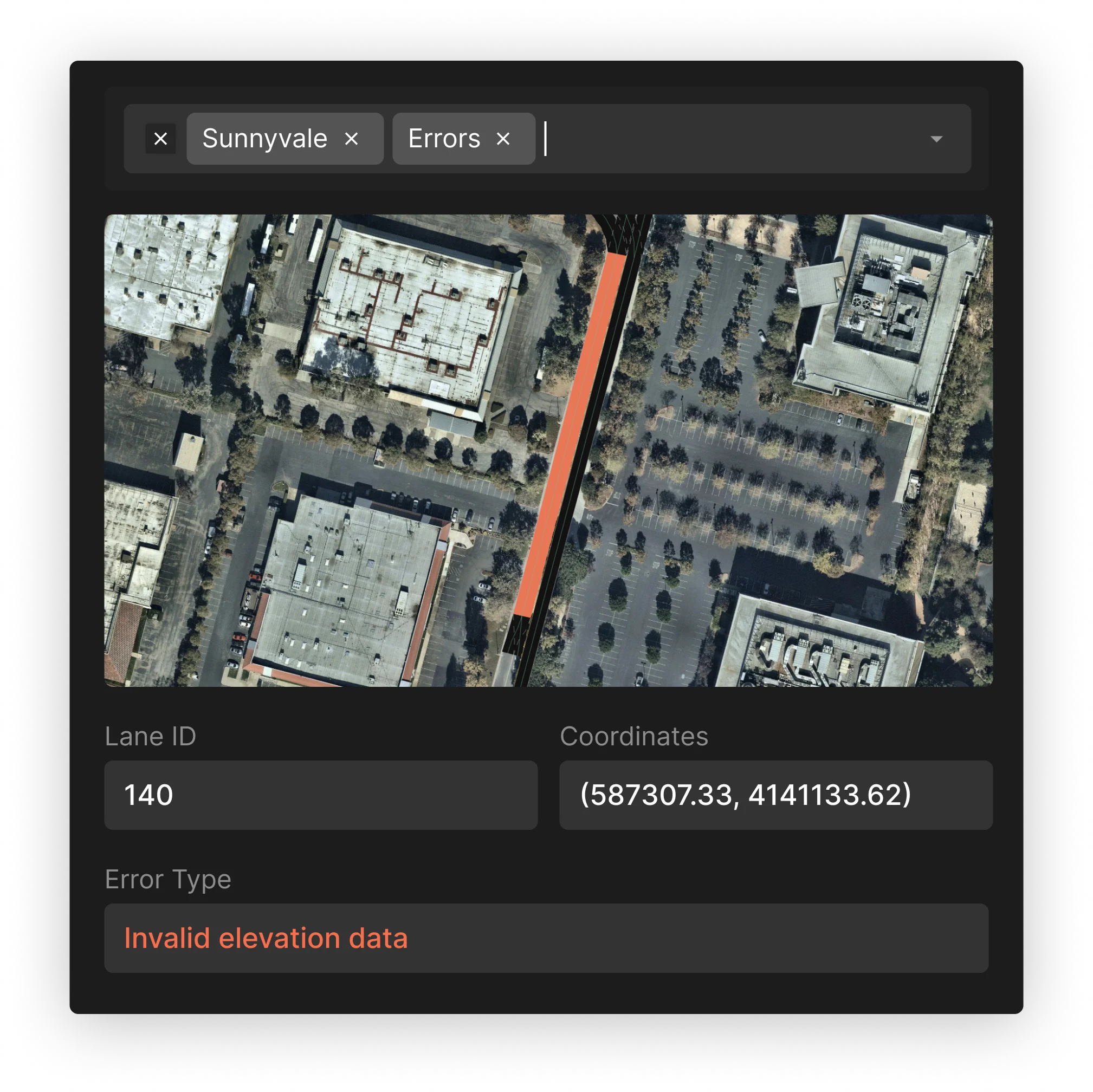
あらかじめ組み込まれたチェック機能で合成地図の品質を保証し、エラーがなく現実的であることを検証します。

.webp)
.webp)

.webp)
.webp)



